The Challenge
Navigate a Dynamic Obstacle Course
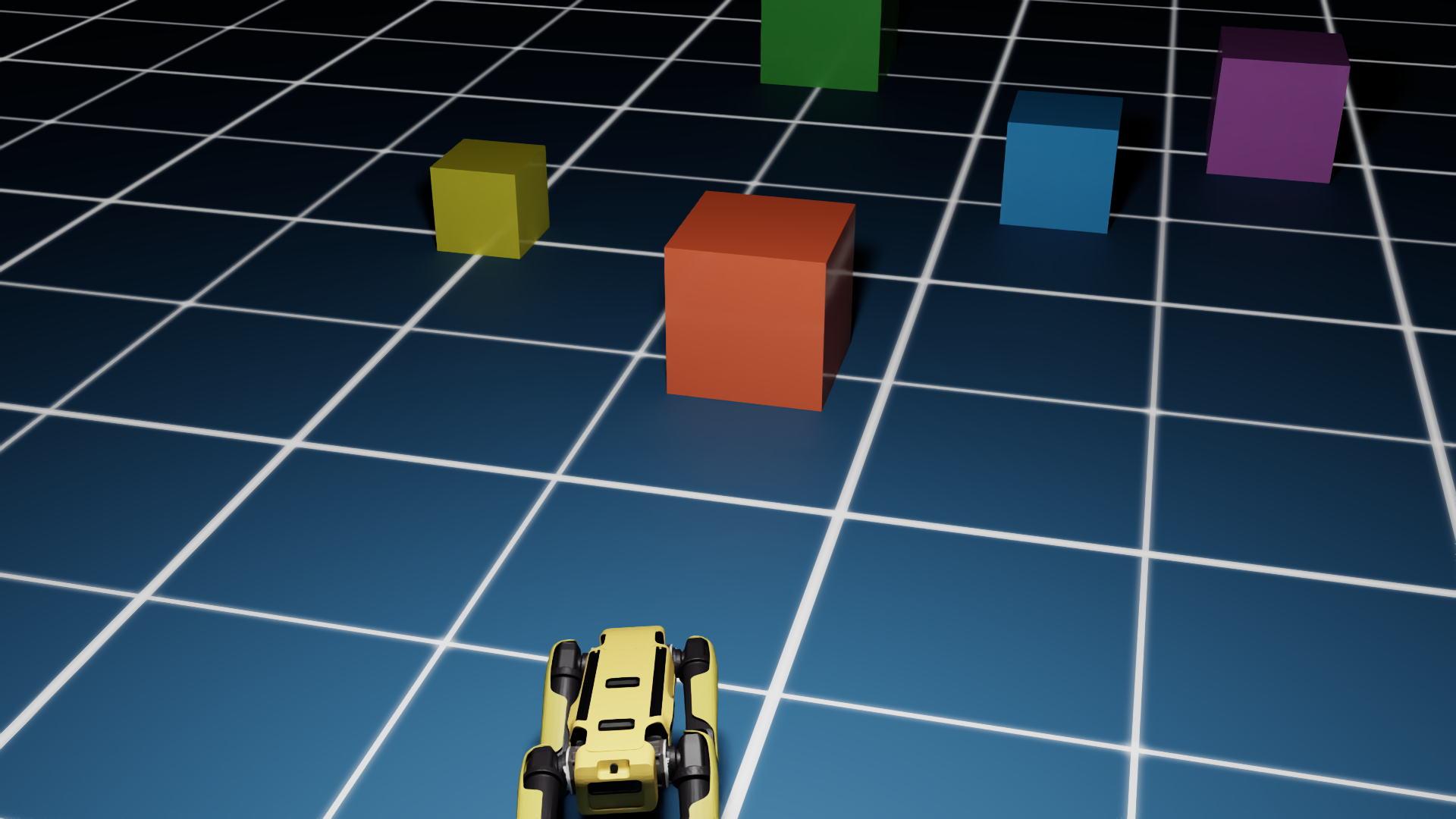
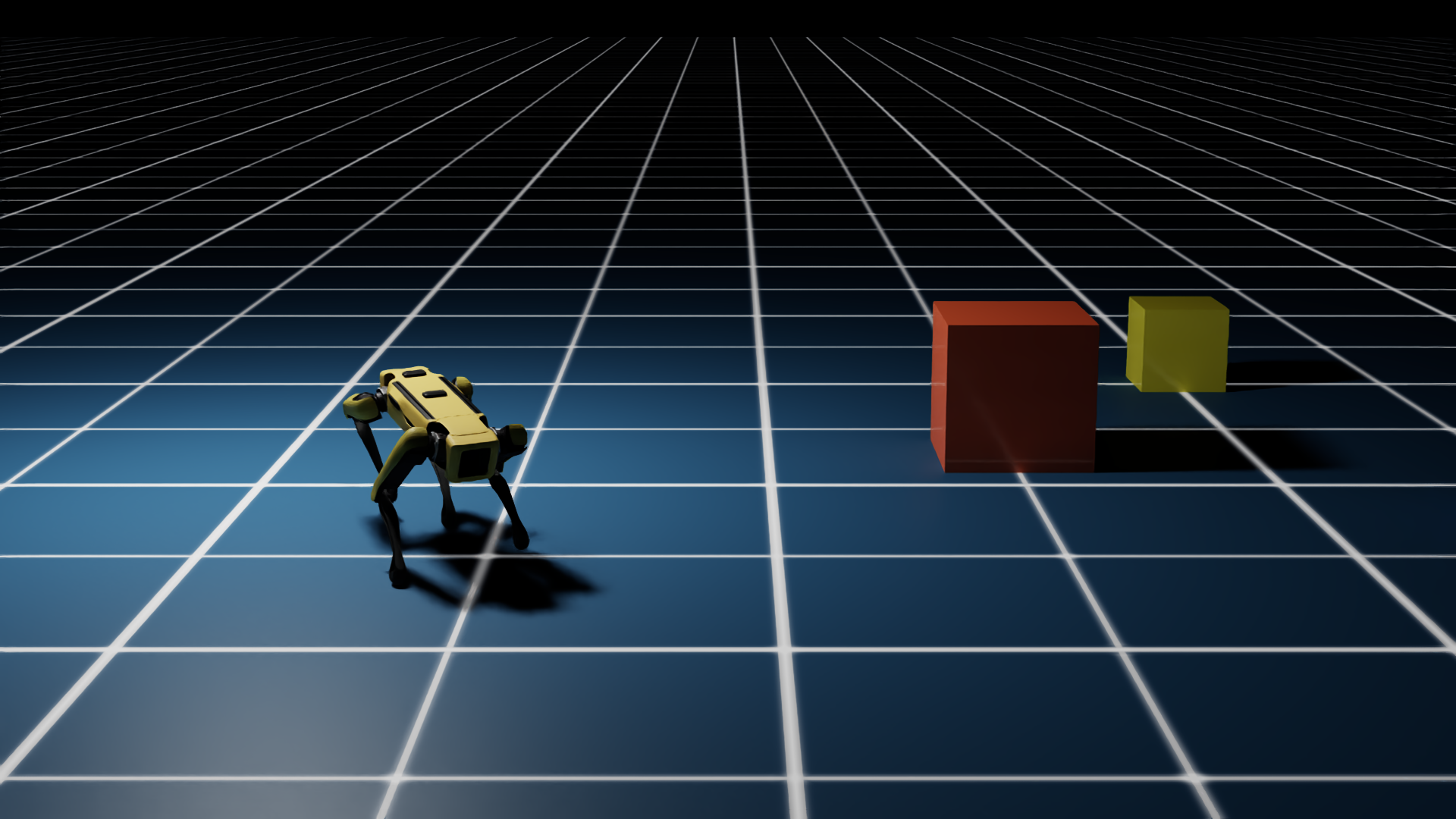
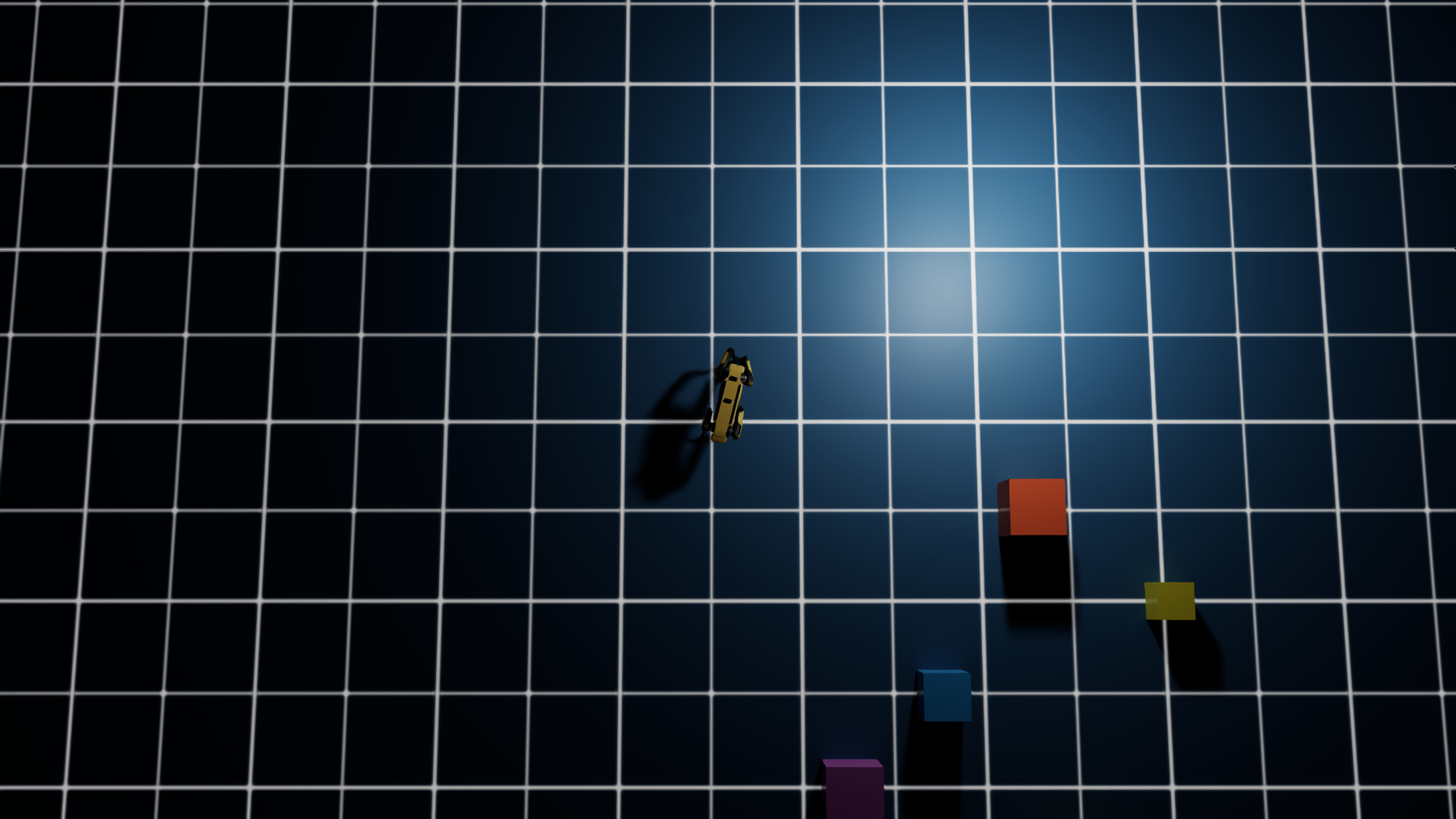
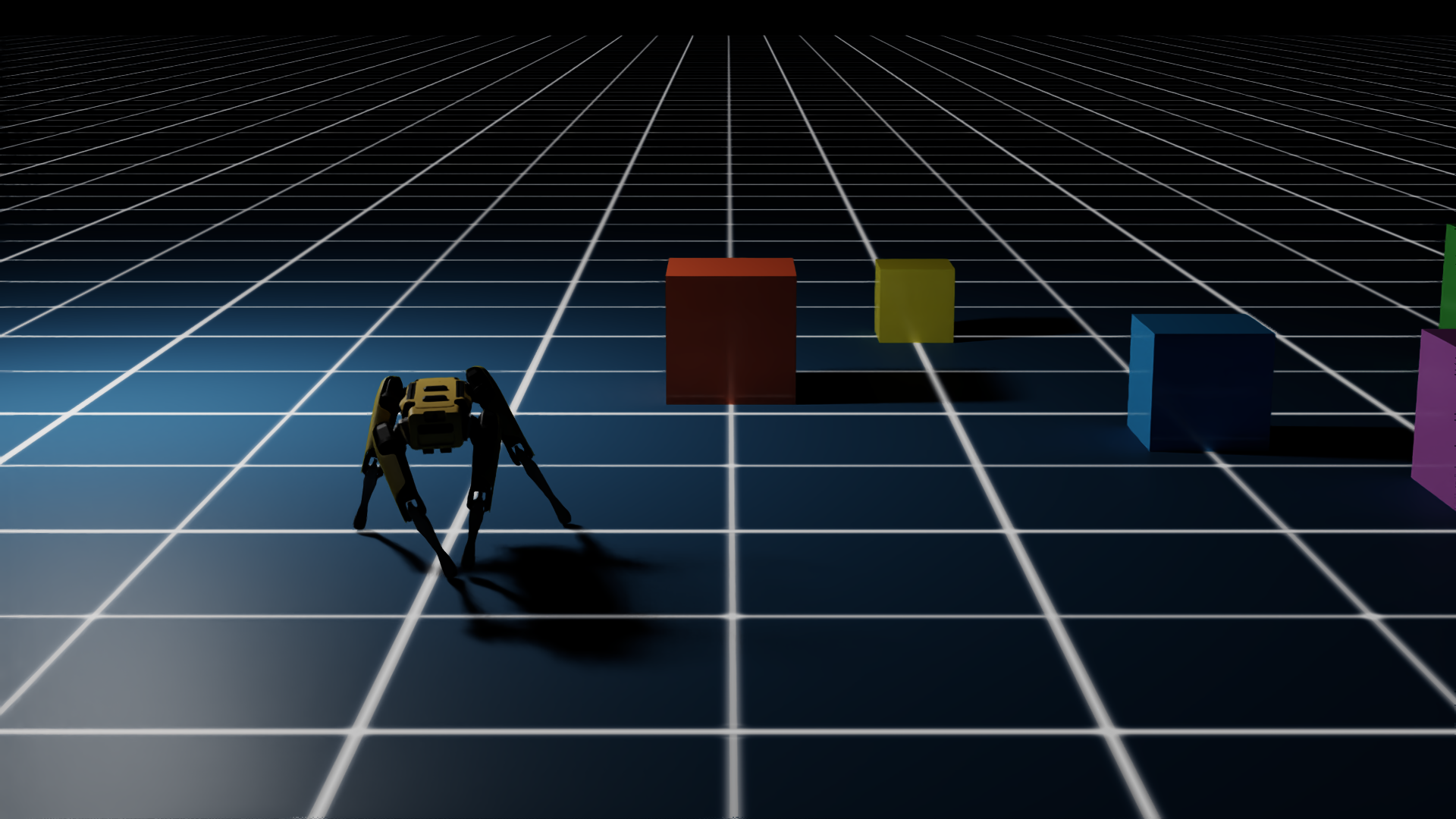
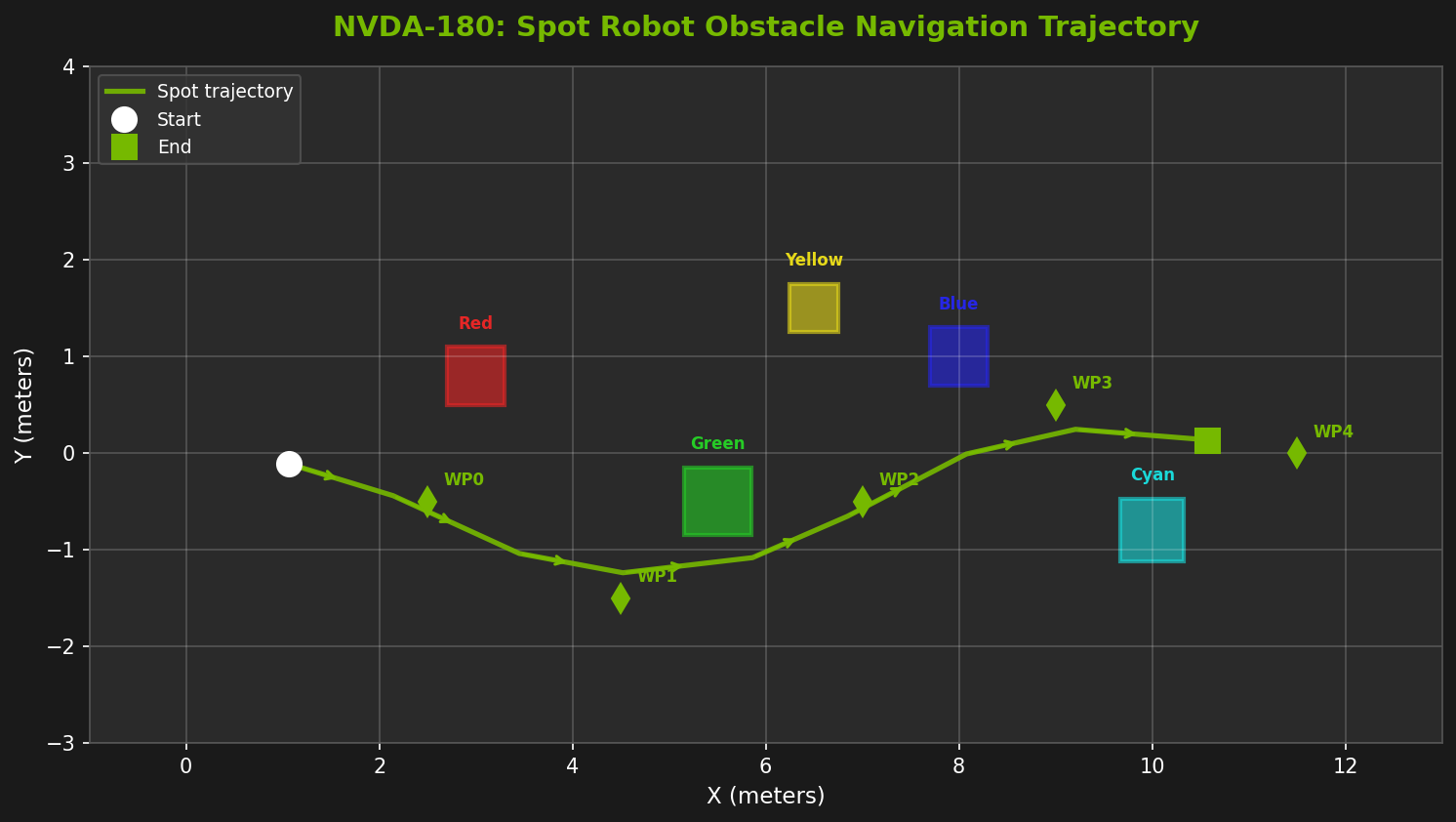
Deploy Boston Dynamics' Spot robot in a simulated environment with 5 colored obstacles arranged across a 12-meter grid. The robot must autonomously walk through the course using an RL-trained locomotion policy, while 3 cameras capture every step.
- 12-DOF quadruped with 48-dimensional observation space
- TorchScript JIT policy running at 200 Hz physics rate
- 5 waypoints with proportional heading control
- 3 synchronized camera angles: tracking, side, bird's-eye
- 300 simulation steps producing 45 RTX-rendered screenshots